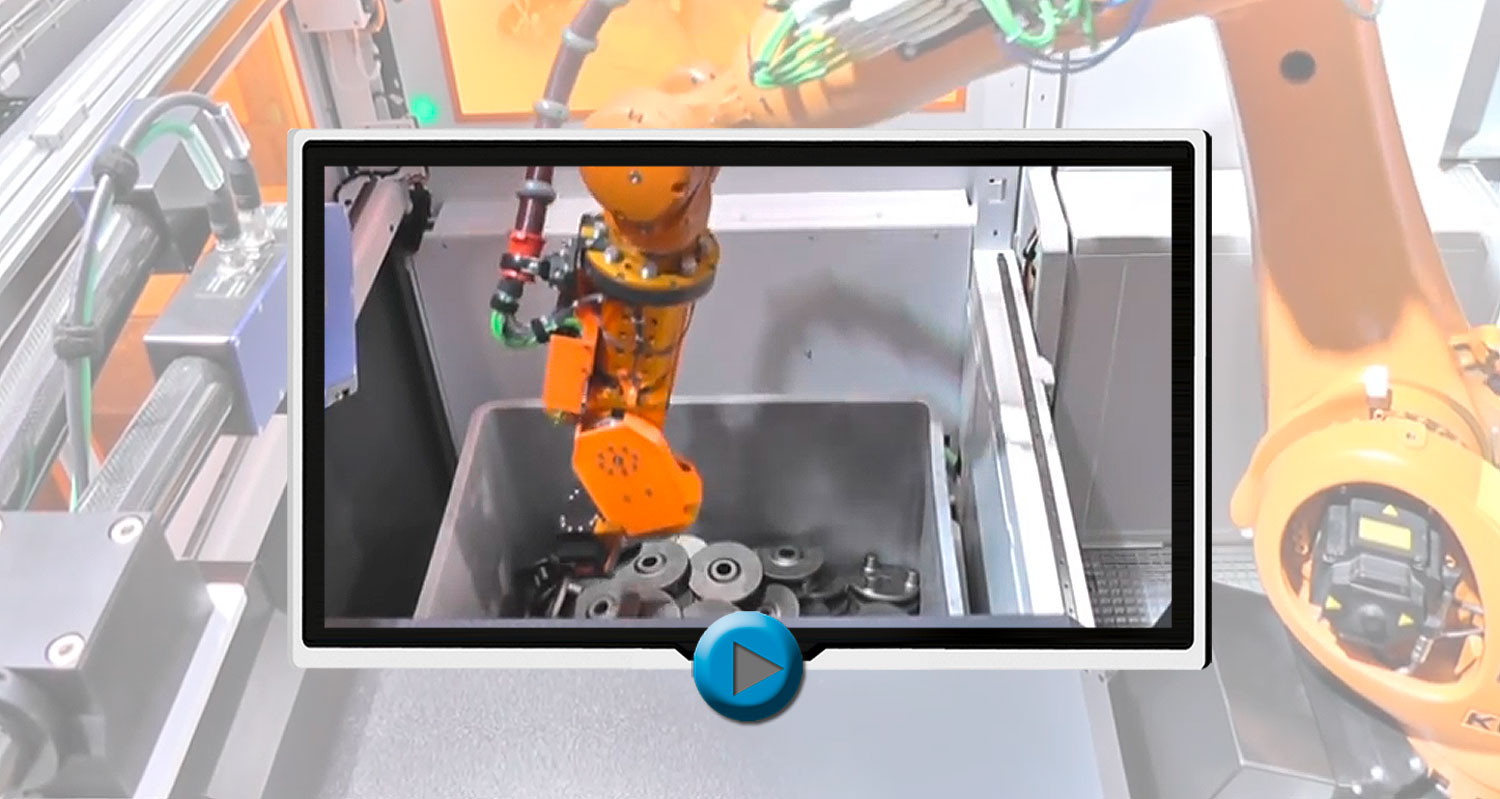
Video – Liebherr-Roboterzelle (LRC): Bin Picking mit neuem
Visionssystem
Bei der Automation von Linienanfang und -ende kommt es darauf an, wie die Werkstücke zugeführt und abgelegt
werden. Handelt es sich bei der Anlieferung um eine reine einlagige Depalletierung, reicht eine Kontur- oder
Merkmalerkennung, damit ein automatisches Greifen und Übergeben an den Folgeprozess stattfinden kann. Sobald
die
Werkstücke auf mehrere Ebenen (etwa gestapelte Blister oder Tablets) stehen, braucht der Roboter ein 2½D-
oder
3D-System. Bei ersterem wird die dritte Dimension über Konturabstände, bzw. über Grauwerte hochgerechnet,
bei
einem echten 3D-Verfahren misst das System dagegen die Punkte im Raum.
Flexible Ein- und Ausschleusung gefragt
Für die Positionierung gilt dasselbe: Je genauer das Werkstück abgelegt werden muss, desto anspruchsvoller
sind
die Anforderungen an das Visionssystem. Eine Ablage auf ein Förderband ist simpel, die Positionierung
innerhalb
einer Werkzeugmaschine anspruchsvoll. Je flexibler die Ein- und Ausschleusung sein soll, desto komplexer
wird
das System.
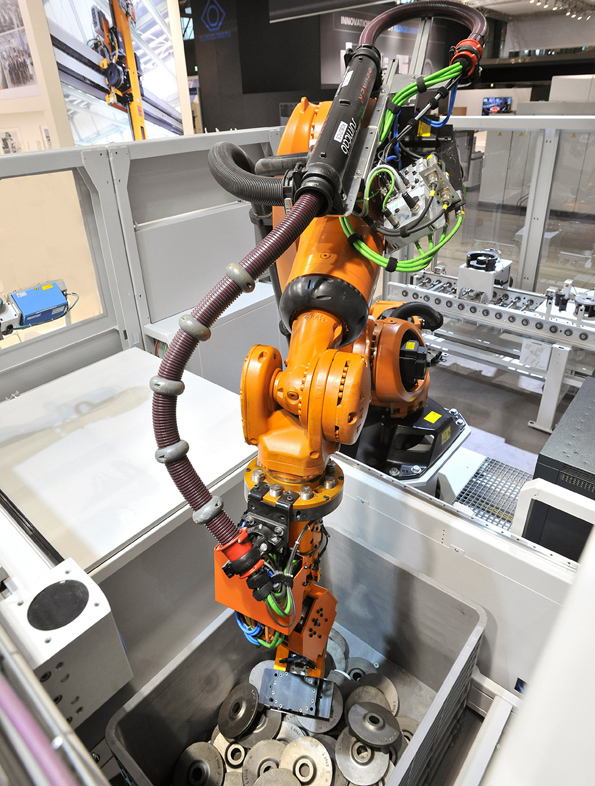
Ein Roboter entnimmt unsortierte Teile aus einer tiefen
Kiste