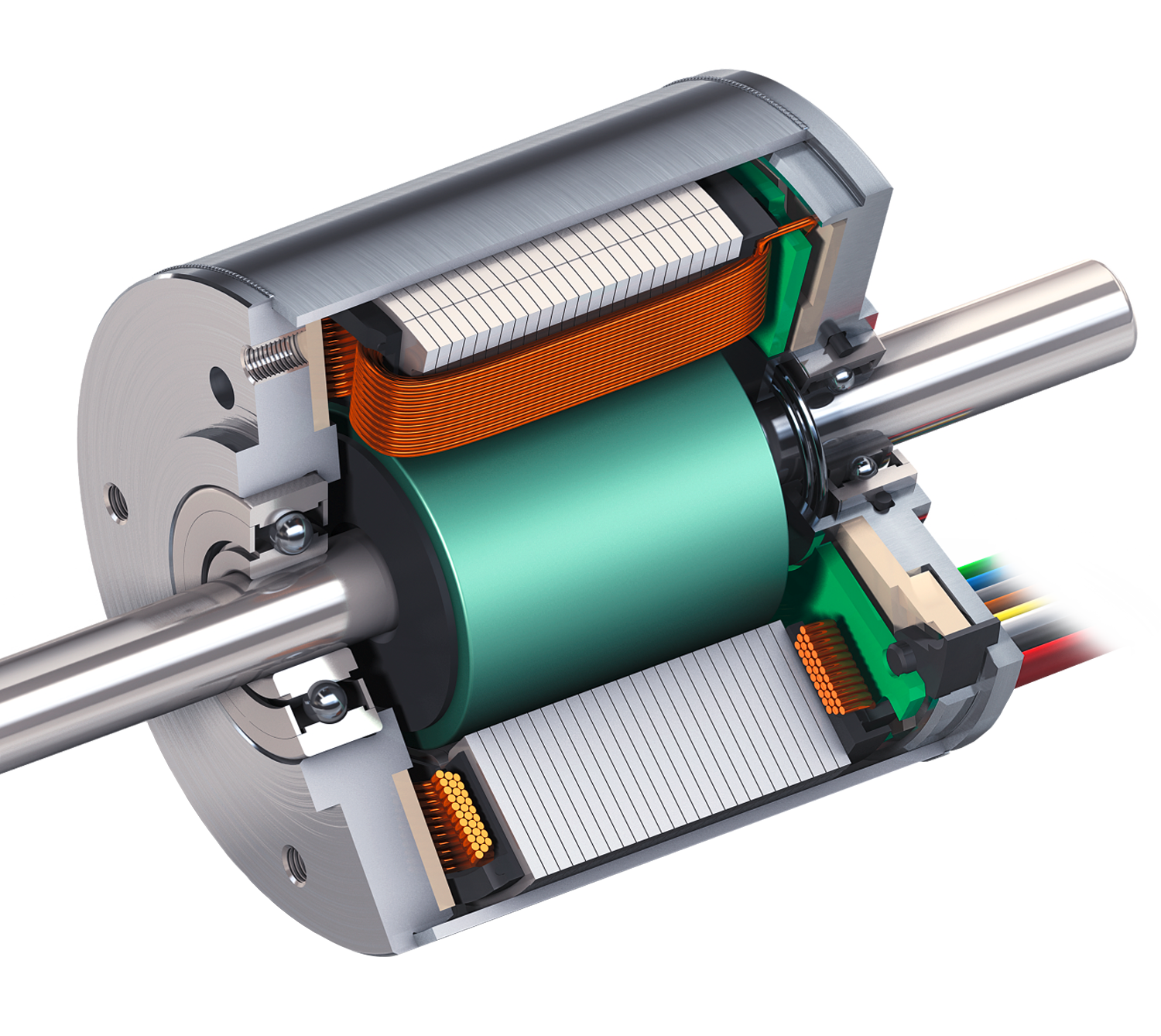
Im Gegensatz zu den klassischen eisenlosen maxon Motoren haben die maxon Flachmotoren und die EC-i Motoren eine
Wicklung mit Eisenkern. Dies ergibt einen höheren Magnetfluss der Wicklung, und der Motor wird stärker.
Allerdings verlangsamt die hohe Induktivität aufgrund des Eisenkerns die Reaktion des Stroms. Bei hohen
Drehzahlen können sich Abweichungen vom einfachen linearen Verhalten der Motoren mit eisenloser Wicklung, z. B.
maxon DCX und ECX SPEED Motoren, ergeben. Der Effekt der magnetischen Sättigung im Eisenkern bei hohen Strömen
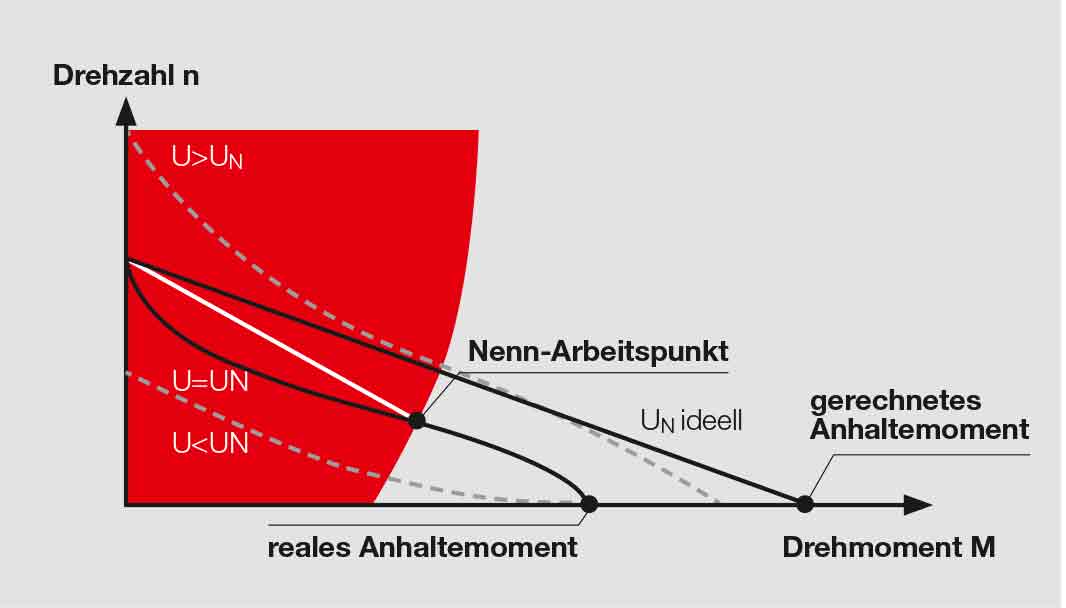
verursacht ebenfalls Nichtlinearitäten. Beide Effekte sind im schematischen Diagramm der
Abbildung 1
zusammengefasst, welches man auch im maxon Katalog findet.
Abbildung 1: Schematische Darstellung der Effekte (aus dem maxon Katalog).
Linke Diagrammhälfte: Die Effekte bei hoher Drehzahl im linken Teil. Rechte Diagrammhälfte: Die Effekte der magnetischen Sättigung
Elektrische Zeitkonstante
und Kommutierung
Die Motorwicklung stellt eine induktive und resistive Last dar, und der Motorstrom wird exponentiell gedämpft
anwachsen, wenn eine Spannung angelegt wird. Das exponentielle Verhalten ist durch die elektrische
Zeitkonstante, τ_el, charakterisiert, die sich einfach aus der Anschlussinduktivität L
mot
geteilt durch den
Anschlusswiderstand R
mot des Motors berechnet, τel=L
mot⁄R
mot.
Der maximale Strom am Ende ist durch das
Ohm‘sche
Gesetz gegeben, I
end=U
mot ⁄ R
mot.
Bürstenlose Motoren werden elektronisch kommutiert, d. h., der Strom in jeder Phase wird ein- und ausgeschaltet.
Abbildung 3 zeigt den idealen Stromverlauf bei Blockkommutierung in den drei Phasen. Dies dient als
Grundlage
zur Spezifikation der maxon Motoren.
Die Induktivität bewirkt, dass der Wicklungsstrom nicht so abrupt ändern kann, wie es die
Abbildung 3
andeutet.
Wie viel Zeit wird in jedem Kommutierungsintervall für den Stromanstieg benötigt?
Berechnen wir die Dauer eines Kommutierungsintervalls und vergleichen diese mit der elektrischen Zeitkonstanten.
Klar ist: je höher die Motordrehzahl, umso kürzer das Kommutierungsintervall. Zur Berechnung nehmen wir einen
extremen Fall, die Leerlauf-Drehzahl bei Nennspannung n
0. Die Anzahl Kommutierungsintervalle pro Motorumdrehung
ist sechsmal die Anzahl Polpaare p. Während 1 Minute ergeben sich 6p∙n
0 Kommutierungsschritte. Somit ist die
Dauer eines Kommutierungsschritts ∆t
comm=(60 s/min)/(6p∙n
0).
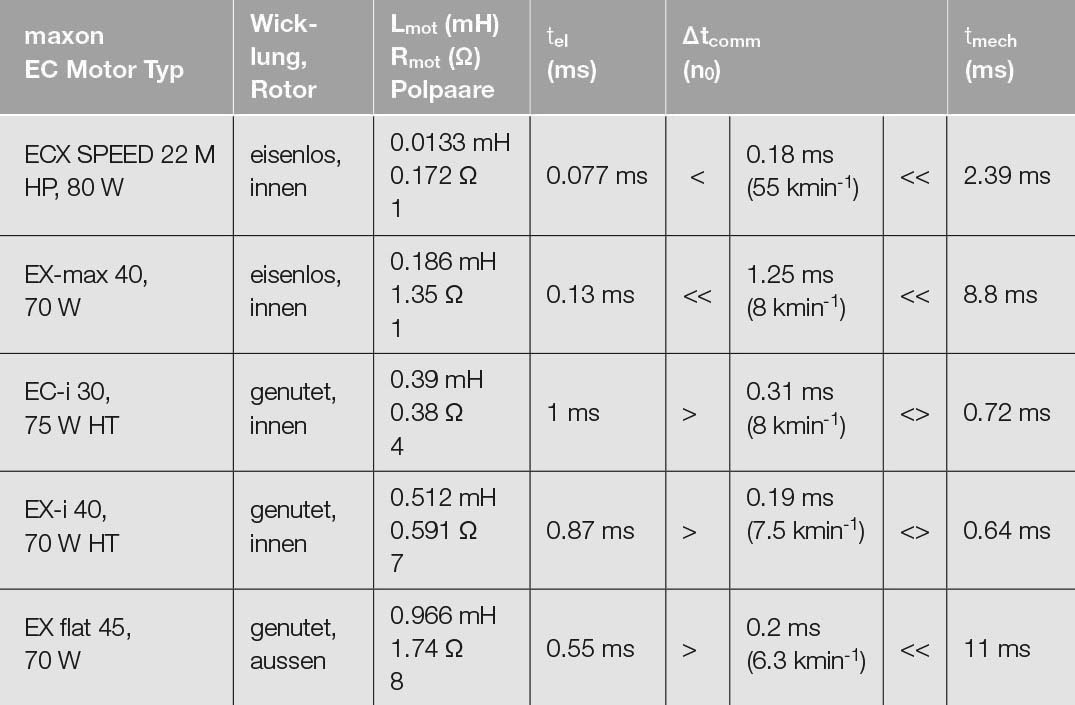
Die Ergebnisse für verschiedene Motordesigns sind in der
Tabelle zusammengefasst.
Tabelle: Vergleich der elektrischen und mechanischen Zeitkonstanten mit der Dauer des
Kommutierungsintervalls bei Leerlauf-Drehzahl für verschiedene bürstenlose maxon EC-Motoren
Die ersten beiden Motoren in der Tabelle haben eine eisenlose maxon Wicklung mit tiefer Induktivität.
Entsprechend sind die elektrischen Zeitkonstanten sehr kurz und – am wichtigsten – bedeutend kürzer als das
Kommutierungsintervall. Somit kann sich der volle Strom in jedem Kommutierungsschritt ausbilden. Beim ECX SPEED
Motor ist die Situation nicht ganz so komfortabel wie beim EC-max 40 aufgrund der extrem hohen Leerlauf-Drehzahl
des Ersteren.