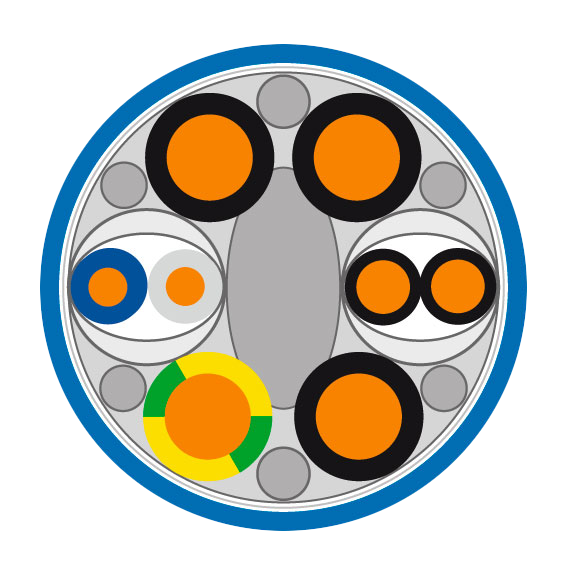
Typischer Kabelaufbau für
Einkabelschnittstellen
Noch vor rund fünf Jahren waren ein Motor mit Encoder und der zugehörige Antrieb (hier als Oberbegriff für
Antriebssteuerung, Drive, Servo-Regler, Servo-Drive, Frequenzumrichter usw. verwendet) meist mit zwei Kabeln
verbunden. So ließen sich Daten und Energie zuverlässig trennen. Dies war jedoch mit einem erhöhten Platz-
und
Materialbedarf sowie einigem Mehraufwand bei der Fertigung und Installation verbunden.
Die
wirtschaftlichere
Alternative sind Einkabelinstallationen. Diese Entwicklung wurde auch durch die auf dem
RS485-Übertragungsstandard basierenden Protokolle HIPERFACE DSL
® und SCS open link
vorangetrieben.
Die
Kabelhersteller entwickelten passende hybride Schirm-in-Schirm-Motorkabel mit einem äußeren und mehreren
innen
liegenden Schirmen.
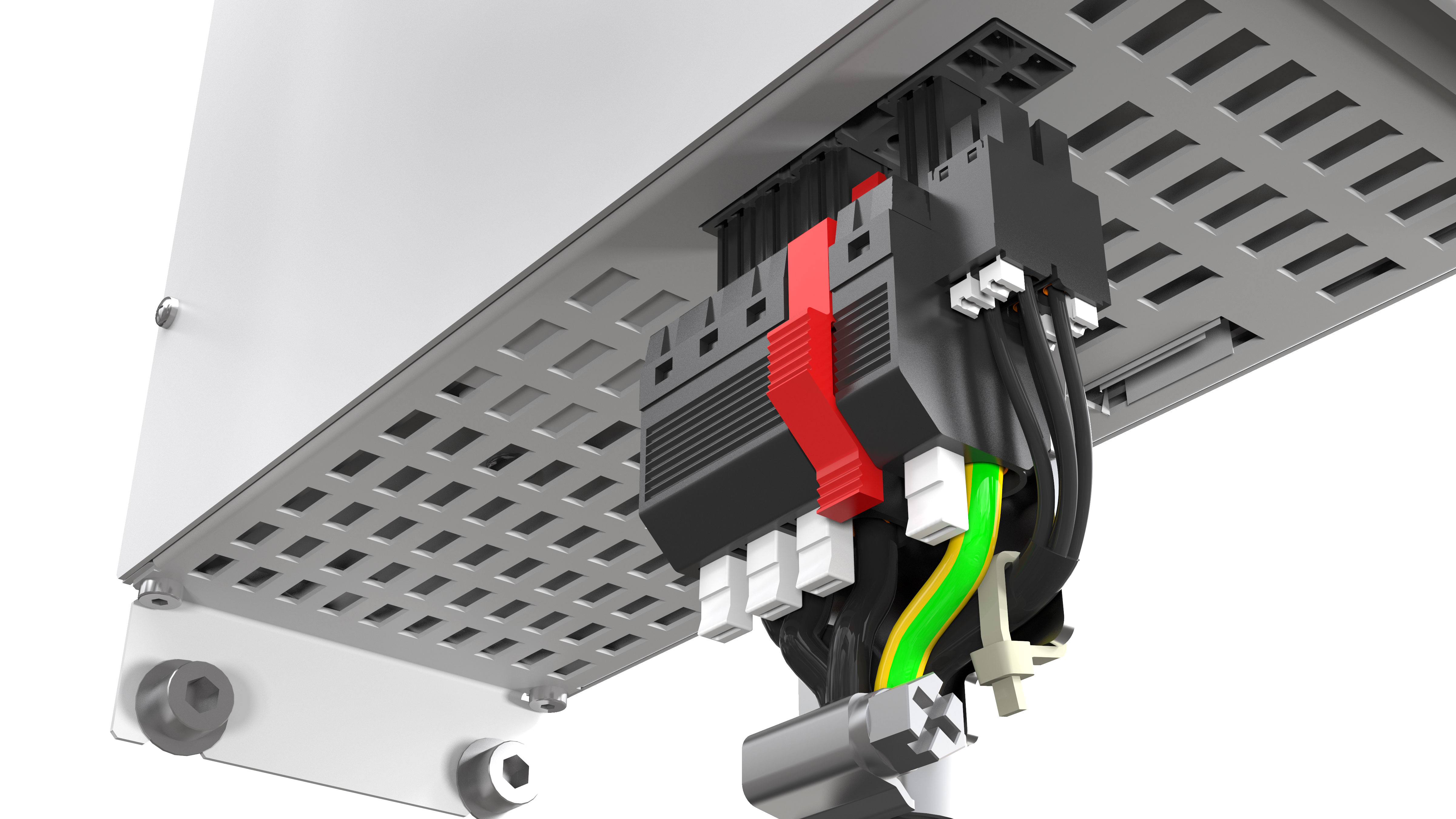
Einkabellösungen zwischen Motor und Antriebsregler
Es ist konsequent, dass ein Kabel auch mit einem einzigen Steckverbinder bzw. Anschluss jeweils am Motor und
am
Antrieb versehen ist. Auf der Motorseite haben sich M23-Rundsteckverbinder bewährt. Anders auf der
Antriebsseite. Bisher wird das Kabel hier oft noch auf zwei Steckverbinder gesplittet. Die konsequente
Lösung
sind natürlich auch hier Hybrid-Steckverbinder.